
Post by kellyyu on Mar 25, 2024 3:55:13 GMT -5
MEMS gyroscope is widely used in attitude control platform and inertial navigation as a device to detect the angular rate information of carrier. It has the characteristics of small size, low cost, high reliability and easy integration.
In recent years, the research of MEMS sensor mainly focuses on single-axis gyro, which can only determine the angular rate of a certain direction. With the progress and maturity of MEMS sensor technology, the accuracy of single-axis MEMS gyro has gradually improved, and key indicators such as bias stability have been able to meet the application requirements of navigation level (bias stability <10 °/h). However, because single-axis MEMS gyroscope can only detect the angular velocity from one axis, it has certain limitations, so the research of three-axis gyroscope has become an important development direction of MEMS sensors.
Because the three-axis gyroscope can detect angular rates in three different directions, it is more suitable for detecting the position change of objects. By solving the angular rates in three different spatial directions, it can obtain the attitude and inertial motion of the carrier in three-dimensional space. However, for a long period of time, three single-axis gyroscopes need to be orthogonally arranged to realize the angular rate information detection in three axes (X, Y, Z). This paper will introduce three integration methods of three-axis MEMS gyroscopes.
Orthogonal integration of three single axis MEMS gyroscope
The orthogonal integration of three single-axis gyros is constructed with three single-axis gyros. The advantages of the gyros are relatively simple structure (all of them are single-axis gyros), but the main problems are low integration degree, large assembly error and large system volume. Under normal circumstances, the three single-axis gyro uses the same structure to save costs and improve the yield (only the same kind of gyro can be processed), at the same time, the control system of the three single-axis gyro is centralized in a digital chip in the form of a central processing chip, which can also reduce the system volume and reduce the system cost to a certain extent. This method can be used when the single-axis gyro is mature and the system volume is not high. Figure 1 shows the orthogonal integration form of three single-axis gyroscopes.
ER-3MG-01 and ER-3MG-06 use this orthogonal integration method, respectively, applied to two kinds of bodies, the former can mainly find the north, the latter is mainly a high-performance three-axis MEMS gyroscope.
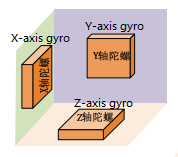
Figure 1 Orthogonal integration of 3 axis MEMS gyro
Single-chip single-structure three-axis MEMS gyroscope
As shown in Figure 2, the Z-axis detection principle of the structure proposed by Newcastle University is exactly the same as that of the ring gyro. Through the vibration of the driving mode in the plane, the angular rate input of the X and Y axes is detected by the out-of-plane motion. Although the structure realizes the single-chip three-axis gyro in principle, the motion amplitude of the X and Y axes is small. The shaft is coupled with each other.
STMicroelectronics proposed a low-power single-chip three-axis MEMS gyroscope and equipped it with a three-axis open-loop integrated circuit, the structure of which is shown in Figure 3. The structure adopts the form of mass block-comb structure, the first mode is the drive mode, the second mode is the in-plane detection mode (course angular rate direction), the two out-of-plane motion modes are the pitch angle rate direction and the roll angle rate detection direction, and the mode resonance frequency is 20 kHz. The structure size is 3.2mm × 3.2mm, the noise level is less than 0.03 °/s/ Hz, and the measuring range is 2000 °/s.
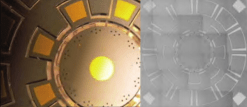
Figure 2 Structure of ring monolithic three-axis gyroscope proposed by Newcastle University
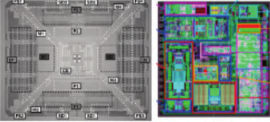
Figure 3 Structure of monolithic three-axis gyroscope proposed by STMicroelectronics
Monolithic multi-structure MEMS gyroscope array
A single chip multi-structure gyro array is composed of multiple single (double) axis gyro structure chips. The Hahn-Schickard-Gesellschaft Institute of Microsystems and Information Technology proposed a 7.5 mm×7.5 mm three-axis gyro array, which relies on two structural forms. The three gyro structures are independent of each other and distributed in a plane, as shown in Figure 4. The bandwidth of X-axis, Y-axis and Z-axis gyro is 50 Hz, the nonlinearity is ≤0.2%, ≤0.2% and ≤0.1%, and the noise is < 0.45 °/s, < 0.45 °/s and < 0.2 °/s, respectively.
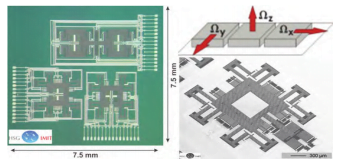
Figure 4 Three-axis gyro array proposed by Hahn-SchickardGesellschaft Institute of Microsystems and Information Technology
Agency for Science, Technology and Research, Singapore proposed a combination sensor array of three-axis gyro and three-axis accelerometer, in which the X-axis and Y-axis gyro adopt angular vibration form, and the Z-axis gyro adopts linear vibration form. Its structure is shown in Figure 5. The three axis ranges of the gyroscope are 1000 °/s, and the X-axis, Y-axis and Z-axis scale factors, nonlinearity, zero-bias stability and angular random walk are respectively: LSB / 5.01 ° s, 5.09 LSB / ° LSB / ° / s/s and 12.91, 0.2%, 0.8% and 0.6%, 0.07 ° s, 0.04 ° and 0.03 ° s/s, 0.17 ° s /), 0.14 °/√s and 0.04 °/√s, the structure size is 2.0mm × 2.0mm × 0.5mm.
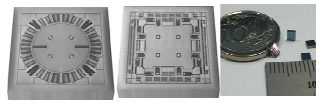
Figure 5 Three-axis gyro array proposed by Agency for Science, Technology and Research, Singapore
This article introduces three integration methods for three-axis MEMS gyroscopes. If you are interested in other knowledge of MEMS gyroscope, please contact us.
In recent years, the research of MEMS sensor mainly focuses on single-axis gyro, which can only determine the angular rate of a certain direction. With the progress and maturity of MEMS sensor technology, the accuracy of single-axis MEMS gyro has gradually improved, and key indicators such as bias stability have been able to meet the application requirements of navigation level (bias stability <10 °/h). However, because single-axis MEMS gyroscope can only detect the angular velocity from one axis, it has certain limitations, so the research of three-axis gyroscope has become an important development direction of MEMS sensors.
Because the three-axis gyroscope can detect angular rates in three different directions, it is more suitable for detecting the position change of objects. By solving the angular rates in three different spatial directions, it can obtain the attitude and inertial motion of the carrier in three-dimensional space. However, for a long period of time, three single-axis gyroscopes need to be orthogonally arranged to realize the angular rate information detection in three axes (X, Y, Z). This paper will introduce three integration methods of three-axis MEMS gyroscopes.
Orthogonal integration of three single axis MEMS gyroscope
The orthogonal integration of three single-axis gyros is constructed with three single-axis gyros. The advantages of the gyros are relatively simple structure (all of them are single-axis gyros), but the main problems are low integration degree, large assembly error and large system volume. Under normal circumstances, the three single-axis gyro uses the same structure to save costs and improve the yield (only the same kind of gyro can be processed), at the same time, the control system of the three single-axis gyro is centralized in a digital chip in the form of a central processing chip, which can also reduce the system volume and reduce the system cost to a certain extent. This method can be used when the single-axis gyro is mature and the system volume is not high. Figure 1 shows the orthogonal integration form of three single-axis gyroscopes.
ER-3MG-01 and ER-3MG-06 use this orthogonal integration method, respectively, applied to two kinds of bodies, the former can mainly find the north, the latter is mainly a high-performance three-axis MEMS gyroscope.
Figure 1 Orthogonal integration of 3 axis MEMS gyro
Single-chip single-structure three-axis MEMS gyroscope
As shown in Figure 2, the Z-axis detection principle of the structure proposed by Newcastle University is exactly the same as that of the ring gyro. Through the vibration of the driving mode in the plane, the angular rate input of the X and Y axes is detected by the out-of-plane motion. Although the structure realizes the single-chip three-axis gyro in principle, the motion amplitude of the X and Y axes is small. The shaft is coupled with each other.
STMicroelectronics proposed a low-power single-chip three-axis MEMS gyroscope and equipped it with a three-axis open-loop integrated circuit, the structure of which is shown in Figure 3. The structure adopts the form of mass block-comb structure, the first mode is the drive mode, the second mode is the in-plane detection mode (course angular rate direction), the two out-of-plane motion modes are the pitch angle rate direction and the roll angle rate detection direction, and the mode resonance frequency is 20 kHz. The structure size is 3.2mm × 3.2mm, the noise level is less than 0.03 °/s/ Hz, and the measuring range is 2000 °/s.
Figure 2 Structure of ring monolithic three-axis gyroscope proposed by Newcastle University
Figure 3 Structure of monolithic three-axis gyroscope proposed by STMicroelectronics
Monolithic multi-structure MEMS gyroscope array
A single chip multi-structure gyro array is composed of multiple single (double) axis gyro structure chips. The Hahn-Schickard-Gesellschaft Institute of Microsystems and Information Technology proposed a 7.5 mm×7.5 mm three-axis gyro array, which relies on two structural forms. The three gyro structures are independent of each other and distributed in a plane, as shown in Figure 4. The bandwidth of X-axis, Y-axis and Z-axis gyro is 50 Hz, the nonlinearity is ≤0.2%, ≤0.2% and ≤0.1%, and the noise is < 0.45 °/s, < 0.45 °/s and < 0.2 °/s, respectively.
Figure 4 Three-axis gyro array proposed by Hahn-SchickardGesellschaft Institute of Microsystems and Information Technology
Agency for Science, Technology and Research, Singapore proposed a combination sensor array of three-axis gyro and three-axis accelerometer, in which the X-axis and Y-axis gyro adopt angular vibration form, and the Z-axis gyro adopts linear vibration form. Its structure is shown in Figure 5. The three axis ranges of the gyroscope are 1000 °/s, and the X-axis, Y-axis and Z-axis scale factors, nonlinearity, zero-bias stability and angular random walk are respectively: LSB / 5.01 ° s, 5.09 LSB / ° LSB / ° / s/s and 12.91, 0.2%, 0.8% and 0.6%, 0.07 ° s, 0.04 ° and 0.03 ° s/s, 0.17 ° s /), 0.14 °/√s and 0.04 °/√s, the structure size is 2.0mm × 2.0mm × 0.5mm.
Figure 5 Three-axis gyro array proposed by Agency for Science, Technology and Research, Singapore
This article introduces three integration methods for three-axis MEMS gyroscopes. If you are interested in other knowledge of MEMS gyroscope, please contact us.